Существует множество разновидностей двигателей и все они имеют различные характеристики. Наша компания поможем вам подобрать, рассчитать рабочие параметры электродвигателя, ведь правильный подбор мотора должен учитывать специфику приводного механизма, условия работы, окружающей среды - это определяет длительность безаварийной работы и надежность системы.
В накопителе, состоящем из двигателя и приемника, с передачей, которая изменяет соотношение скоростей между этими двумя осями, динамическое уравнение устанавливается из предположений о жесткости кинематической цепи, поэтому потерь нет диссипации или значительных деформаций в направлении движения, при которых мощность не делится и не поступает на последовательные этапы цепи. На рисунке 2 показана конфигурация простой цепи привода.
Для расчета оптимального коэффициента передачи, который уменьшает крутящий момент, требуемый двигателем, для условий, установленных системой, проводится анализ мощности, действующей на двигатель, трансмиссию и приемник, в соответствии с парами, действующими в каждом компонентов цепи привода, в соответствии с уравнением 4 для угловых перемещений.
Основные параметры для подбора двигателей
- напряжение, В
- 220 В- 1 фаза
- 220/380 В - 3 фазы
- 380/660 В - 3 фазы
- мощность, кВт
- частота вращения, об/мин
- монтажное исполнение (лапы, фланец, комби)
- энергоэффективность
Варианты исполнения двигателей
 |
|
Двигатель может быть: общепромышленный, вертикальный, многоскоростной, тяговый, взрывозащищенный, встраиваемый, морской, руднический, погружной, крановый, транспортный и пр.
Рисунок Моменты и скорости элементов приводной цепи. Оценка переходной мощности. Основные силовые пары в движениях, выполняемые механическим приводом, получены из сил инерции, тогда как силы сопротивления приемника имеют более низкие значения; Кроме того, учитывая высокую эффективность передачи, можно считать, что пассивное сопротивление нагрузки равно нулю и что производительность является унитарной. С другой стороны, для оптимизации движения время должно быть сведено к минимуму или максимизировано ускорение.
Вводя эту переменную в ранее разобранные выражения, мы нашли уравнение 7, относящееся к отношению переходных мощностей и двойной кинетической энергии исполнительного механизма и приемником. Рассматривая репрезентативную точку требований приемника, отношения переходной мощности и двойной кинетической энергии вызывают параметрическую кривую как функцию переменной К тангенциальных приводов или тех комбинаций двигателя и трансмиссии, которые отвечают минимально необходимым условиям, для перемещения приемника с требуемыми кинематическими условиями.
Расчет пускового тока асинхронного электродвигателя
 |
Расчет пускового тока электродвигателя может потребоваться для того, чтобы подобрать подходящие автоматические выключатели, способные защитить линию включения данного электродвигателя, а также для того, чтобы подобрать подходящее по параметрам дополнительное оборудование (генераторы и пр.). Расчет пускового тока электродвигателя осуществляется в несколько этапов: Таким образом, графическое представление может быть выведено в логарифмическом масштабе, что позволяет выбрать двигатель и указать отношение передачи, как это схематично в том, где в абсциссе представлена кинетическая энергия, а по оси ординат - временная сила. На этих диаграммах показаны характерные кривые различных двигателей, а также кривая нагрузки, вызванной приемником, отбрасывая те приводы, которые расположены ниже представления нагрузки. Максимальная переходная мощность двигателя и максимальная кинетическая энергия рассчитываются соответственно с максимальным крутящим моментом и с максимальной скоростью, поставляемой с помощью каталогов производителя.
|
- Расчет величины пускового тока по формуле Iпуск=Iн*Кпуск. Здесь Iн — номинальная величина тока, а Кпуск выступает кратностью постоянного тока к номинальному значению, которая также должна указываться в технической документации к электродвигателю.
Софтстартеры и частотники для электродвигателей
Одной из наиболее эффективных категорий устройств, облегчающих тяжелые условия пуска, являются софтстартеры и частотные преобразователи. Особенно ценным считается их свойство поддерживать пусковой ток двигателей переменного тока в течение продолжительного периода — более минуты. Также пусковой ток асинхронного электродвигателя можно уменьшить за счет внедрения внешнего сопротивления в обмотку ротора.
Система транспортировки грузов. Чтобы проиллюстрировать описанную процедуру отбора, была рассмотрена реальная ситуация выполнения, которая иллюстрирует методологию, которой необходимо следовать. Поскольку смещение должно быть значительным; в соответствии с тем, что установлено этой стратегией, когда движение начинается с максимального ускорения, двигатель достигнет своей скорости насыщения до половины маршрута, который должен быть выполнен. Исходя из вышесказанного, стратегии, которые будут использоваться, будут представлены трапецеидальными диаграммами, показанными в и, определенными из подробного в разделе.
Синхронный двигатель: плюсы и минусы
 |
Несомненным преимуществом синхронных двигателей, если сравнивать их с асинхронными аналогами, является то, что возбуждение постоянным током от независимого источника позволяет работать им при высоком значении cosφ (коэффициента мощности) и даже при условии с опережающим током. Такая особенность позволяет благодаря подключению синхронного двигателя поднять показатель cosφ для всей сети. Можно видеть, что скорость насыщения выше в случае возврата, чем для исходящего с нагрузки. Это связано с тем, что время возврата короче, так что пройденные ускорения больше, чем те, которые присутствуют во время кругового путешествия. Рисунок Трапецеидальная диаграмма скорости для продвижения с нагрузкой. Рисунок Трапецеидальная диаграмма скоростей для возврата без нагрузки. Обращая внимание на этот расчет, было учтено, что во время путешествия поездка несет нагрузку 10 кг, а во время возвращения система обработки не имеет нагрузки. Образец включает включение указанных кривых в кривые тангенциальных приводов приемника. Как только серводвигатель был выбран, был рассчитан оптимальный коэффициент передачи, который позволяет выбирать цепь привода. Кроме того, следует отметить и другие преимущества: благодаря тому, что синхронный двигатель работает с высоким cosφ, это обеспечивает снижение потребляемого тока и уменьшение потерь . По сравнению с асинхронным двигателем, имеющим ту же мощность, КПД синхронного будет выше, у синхронного двигателя вращающий момент пропорционален действующему напряжению сети (Uc). В соответствии с полученными результатами можно констатировать, что в момент работы электродвигатель имеет дополнительную переходную мощность, что позволяет серводвигателю преодолевать пассивные сопротивления, возникающие при передаче и нагрузке. Он описывает выбранную передачу, собирая наиболее важные размерные и динамические параметры. Выбор механической цепи привода связан с нагрузкой, передачей и двигательными условиями. Описанные критерии отбора отделяют характеристики приемника от характеристик двигателя, а его графическое представление облегчает точный выбор передаточного отношения редуктора. |
Поэтому синхронный двигатель даже при снижении напряжения в сети сохраняет нагрузочную способность больше, чем асинхронный. Это говорит о большей надежности такого типа двигателей.
В то же время, если сравнивать конструктивные особенности двух типов двигателей, синхронный и асинхронных, стоит отметить, что конструкция синхронных - сложнее, а значит они будут дороже при производстве. Так же существенным минусом для синхронных двигателей является необходимость наличия источника постоянного тока (выпрямитель или специальный возбудитель). Кроме того, по сравнению с асинхронным двигателем, пуск происходит сложнее . К недостаткам следует отнести и то, что единственная возможность регулировать (корректировать) угловую частоту вращения у синхронного двигателя - это частотное регулирование .
Открытая методология не зависит от кривой нагрузки, требуемой приемником, и от конкретных параметров сервомотора, позволяя собирать информацию, содержащуюся в различных каталогах исполнительных механизмов, и в частности кинетическую энергию и временную мощность каждого двигателя.
Специфическое промышленное применение было изучено путем применения описанной процедуры, выбора сервомотора в соответствии с требованиями системы и коммерческого шарикового винта для передачи. В качестве окончательного предложения предлагается проанализировать практические случаи, которые включают законы треугольного движения и различные конфигурации трапециевидного движения.
Но преимущества, характерные для синхронных двигателей (особенно на высокомощных, больше 100 кВт двигателях) значительно превосходят имеющиеся недостатки. Именно поэтому они получили подавляющее распространение в тех технологических процессах, где не требуется производить частые остановки/запуски и где нет необходимости регулировать частоту вращения.
В системах привода для высокопроизводительных машин? Журнал механизмов, трансмиссий и автоматизации в дизайне, том 106, 102. Труды Австралийской конференции по робототехнике и автоматизации, Брисбен, Австралия, 172. Труды Австралийской конференции по робототехнике и автоматизации, Мельбурн, Австралия. Вклад в динамическое моделирование кооперативной манипуляции?
Механизм и теория машин, том 25, 407. Механизмы и теория машин, № 42,, 48. Выбор двигателя для гидравлического применения может быть сложным. Следующая статья раскрывает процесс обсуждения фундаментальных факторов отбора. Идеальным в дизайне гидравлической системы является то, что вся эффективность соответствует ожидаемой производительности приложения. Это требует от дизайнера сначала согласования двигателя, а затем насоса с конкретным ожиданием производительности системы. Если требование состоит в том, чтобы что-то делать в течение определенного периода времени или при обработке с заданной суммой нагрузки, конструкция системы полностью изменится в зависимости от выбранного двигателя.
Для обеспечения надежной и экономичной работы системы электропривода необходимо произвести выбор электродвигателя правильно. Электрическая машина должна иметь мощность, которая строго соответствует ожидаемой нагрузке, а также режиму работы электропривода. Электропривод довольно сильно распространен в промышленности, имеет большое множество условий работы и требований рабочих машин, что делает выбор мощности электродвигателя не легкой задачей.
Гидравлический двигатель - это гидравлический привод, который при правильном подключении к гидравлической системе создает вращательное движение. Это может быть однонаправленным или двунаправленным в зависимости от конструкции системы. Двигатели очень похожи по конструкции на насосы только там, где насос принимает вращательное движение, чтобы вывести гидравлическую жидкость из устройства, в то время как двигатель будет течь к нему, и вращающееся движение выйдет.
Каждый тип моторного снаряжения, поддона и поршней имеет специальный профиль производительности. Таким образом, знание требований к производительности приложения и типа двигателя, который наилучшим образом соответствует цели, является первым шагом. Затем необходимо оценить конструктивные преимущества ваших вариантов двигателя и степень сложности, которая требуется в общей системе.
Завышение мощности электрической машины не является выходом из ситуации. Это связано с тем, что помимо излишних экономических затрат на завышенную мощность вырастают и габариты электродвигателя, его масса, ухудшаются энергетические показатели системы (машина работает с пониженным КПД), а в случае асинхронных электродвигателей с низким коэффициентом мощности cosφ увеличивается потребление , что в свою очередь создает дополнительные проблемы. Занижение мощности то же не выход, так как это приведет к повышению температуры изоляции обмоток, соответственно срок службы машины существенно снижается.
В конце концов, все возвращается к ожиданиям производительности приложения. У некоторых есть серьезные рабочие циклы, в то время как другие - нет. Если, например, легкий, малоэффективный двигатель рассматривается в превосходном рабочем приложении, срок службы двигателя будет меньше срока службы высокопроизводительного двигателя, предназначенного для работы в этом типе двигателя. сред. Важно понимать, что давление и ход работы необходимы для того, чтобы выбранный двигатель соответствовал ожидаемым показателям применения.
Каждый тип двигателя имеет свой собственный набор приложений, где он является лучшим вариантом, чем другие. Конечно, есть большая стоимость при работе с более мощным движком. Окончательное решение всегда будет зависеть от того, что требуется с точки зрения производительности приложения и срока службы двигателя по сравнению с желаемой стоимостью.
Даже если выбор электрической машины осуществлен правильно, то в процессе работы могут возникать кратковременные толчки нагрузки (резкое увеличение момента сопротивления), которые могут значительно превосходить номинальную мощность электромашины. Однако, каждый тип электрической машины имеет свои факторы электрического происхождения, которые даже при кратковременной перегрузке (если она превзойдет определенный предел) могут вызвать нарушение нормальной работы механизма. При выборе электродвигателя необходимо руководствоваться двумя основными факторами – мгновенной перегрузкой и нагревом.
Между ними лучшее из обоих миров: бензиновый двигатель и электродвигатель в каждый момент демонстрируют, что их технический симбиоз никоим образом не является компромиссом. Автономия зависит от множества факторов, включая: поведение вождения, маршрут, погодные условия и использование систем отопления и охлаждения.
Ускоритель и коробка передач, а также стратегия отопления и охлаждения адаптированы для достижения максимальной эффективности. Этот режим также позволяет выбирать ручную передачу через автоматический селектор коробки передач или переключающие лопасти на рулевом колесе. В этой конфигурации двигатель и электродвигатель разворачивают свой крутящий момент с максимальной динамичностью, закон ускорителя запрограммирован для спонтанных реакций и полностью выражена функция усиления двигателя. Эксперты сходятся во мнении, что выбор электродвигателя для создания модели - это прежде всего вопрос вкуса.
Выбор мощности двигателя по нагрузке
Для этого необходимо определить номинальный момент из условия:
Где: М макс – требуемый механизмом максимальный перегрузочный момент;
λ м – перегрузочный коэффициент по моменту;
Если за исходную величину принимают ток, то выражение примет вид:

Однако, как представляется, по крайней мере для наземных транспортных средств, что электродвигатель для моделирования продемонстрирует свою эффективность, может быть более подходящим для вашей модели, когда последний будет развиваться на всех типах местности. В схеме моделирования может быть больше тепловых двигателей.
У каждого производителя моделей есть собственный тепловой двигатель!
Как следует из их названия, универсальные двигатели подходят для всех типов моделей и в принципе ценны для их надежности и мощности настолько, что они также привлекают внимание профессионалов, а также инженеров-разработчиков. Однако пуристы могут смотреть на модельный электродвигатель, специально разработанный для соответствия категории автомобилей, которые они любят. У энтузиастов грузовиков будет много времени, чтобы найти электродвигатель с управляемым двигателем с холостой скоростью, который даст всю мощность, необходимую для работы этого типа модели.
Перегрузочная способность машин постоянного тока
Для машин постоянного тока также необходимо учитывать и условия коммутации на коллекторе. Результирующая ЭДС, индуктируемая в коммутируемых секциях – фактор, вызывающий искрение в ДПТ:
![]()
С очень широким диапазоном выбора в зависимости от скорости вращения этот тип электродвигателя для моделирования модели будет таким же подходящим для гоночного автомобиля, как и для модели самолета, предлагая несравненную мощность, идеально подходящую для крупномасштабных моделей. Напомним, что бесщеточный двигатель, даже если его стоимость выше, предлагает ряд преимуществ. Отсутствие углей значительно ограничивает причины механического износа для более длительного срока службы двигателя. Более компактный, он также намного легче и менее шумно.
Где: е р – ЭДС реактивная — коммутируемой секции;
е к – ЭДС коммутирующая. Создается потоком добавочных полюсов;
е т – ЭДС трансформаторная — индуктируется меняющимся магнитным потоком главных полюсов;
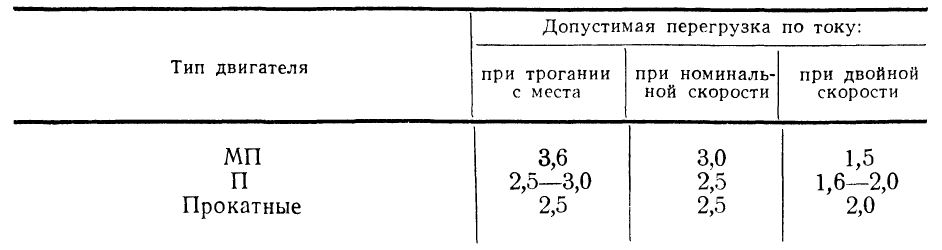
Для ДПТ крановых приводов и металлургических типа МП перегрузочная способность по моменту составляет:

Для длительного режима работы перегрузочная способность ДПТ должна быть не ниже чем 2,5. По току перегрузочную способность можно охарактеризовать:
Также необходимо учесть и то, что у двигателей последовательного и смешанного
возбуждения перегрузочная способность по моменту все же выше, чем по току. Это обусловлено усилением магнитного потока из – за последовательной обмотки возбуждения:
![]()
Перегрузочная способность асинхронных машин
Эта способность асинхронных электродвигателей ограничивается моментом критическим М к. ГОСТ определяет на асинхронные металлургические и крановые трехфазные электроприводы λ>2,3. λ=1,7-2,2 для машин длительного режима работы.
Для асинхронных машин общепромышленной серии длительного режима работы λ:
- Для электродвигателей с фазным ротором – не менее 1,8;
- С короткозамкнутым – 1,65;
Также необходимо помнить и то, что моменты Поэтому необходимо учитывать возможную просадку напряжения в сети до 0,9U ном и в расчетах нужно брать 0,8 перегрузочной способности, приведенной выше.
Перегрузочная способность синхронных машин
У синхронных электромашин такая мгновенная способность примерно равна 2,5-3. За счет форсирования возбуждения можно повысить до 3,5 и даже до 4,0.
Для трехфазных коллекторных электроприводов эта величина сильно зависит от скорости вращения электродвигателя и условий его коммутации. В среднем ее принимают равной порядка λм = 1,5-2.
Изолирующие материалы
Они определяют как и технико-экономические характеристики машины, так и ее надежность работы. Так как нагревостойкость изоляционных материалов относительно невелика, то ее нагрев ограничивает мощность электропривода. Технико-экономические соображения требуют, чтоб при нормальной эксплуатации срок службы изоляции составлял не менее 15-20 лет. По теплостойкости изоляции ее разделяют на:

В связи с тем, что условия работы электрических машин довольно разнообразны в отношении окружающей среды ГОСТ предлагает номинальные данные машины относить к тому случаю, когда температура окружающей среды равна 40 С 0 . Соответственно устанавливаются предельно допустимые значения перегрева над температурой окружающей среды для различных типов изоляции. Максимально допустимую температуру изоляции ϑ изол можно представить как сумму температур окружающей среды и допустимого перегрева:
![]()
Где: ϑ 0 – температура окружающей среды;
τ из – максимальный перегрев изоляции;
Как показывает практика – даже незначительный перегрев электродвигателя приводит к резкому сокращению срока его службы:

Как мы можем увидеть из графика, что для класса А повышение рабочей температуры с 95 0 до 105 0 снижает срок службы электромашины с 15 до 8 лет, что примерно в два раза.
При экспериментальном определении температуры обмоток используют несколько методов – метод термометра (пирометра), метод сопротивлений – при его использовании нагрев определяют по изменению омического сопротивления обмоток, а также метод температурных детекторов (термопары и прочие).
Результат, полученный в ходе измерений, будет довольно сильно зависеть от метода, который был выбран. Применение термометров (пирометров) довольно просто, при использовании дают довольно точный результат, но не позволяют измерять внутреннюю температуру обмоток. При использовании метода сопротивления – получим усредненный результат перегрева и не более. Температурные детекторы дают наиболее точный результат измерений, но только в местах их закладки.




