— хотя биполярные шаговые двигатели относительно дороги, для своих физических размеров они обеспечивают высокий вращающий момент. Однако для двух обмоток мотора требуется восемь управляющих транзисторов, соединенных в четыре Н-моста. Каждый транзистор должен выдерживать перегрузки и короткие замыкания и быстро восстанавливать работоспособность. А драйверу, соответственно, требуются сложные схемы защиты с большим количеством пассивных компонентов.

Рисунок 1
Рисунок 1. Одна микросхема в корпусе для поверхностного монтажа и несколько пассивных компонентов могут управлять биполярным шаговым двигателем.
Управление биполярным шаговым двигателем
Драйвер шагового двигателя своими руками — на Рисунке 1 показана альтернативная схема драйвера двигателя, основанная на аудио усилителе класса D компании Maxim. Микросхема МАХ9715 в миниатюрном корпусе для поверхностного монтажа может отдавать мощность до 2.8 Вт в типичную нагрузку 4 или 8 Ом. Каждый из двух выходов микросхемы образован Н-мостами из мощных MOSFET, управляющими парами линий OUTR+, OUTR- и OUTL+, OUTL-, которые подключаются к обмоткам А и В шагового двигателя, соответственно. Каждая пара формирует дифференциальный широтно-модулированный импульсный сигнал с номинальной частотой переключения 1.22 МГц. Малый уровень помех, создаваемых схемой, исключает необходимость в выходных фильтрах.
Конденсаторы развязки
Конденсаторы С1, С3, С4 и С6 служат развязкой для входов питания и смещения, а С5 и С7 выполняют накопительные функции для мощных выходных усилителей класса D. Конденсаторы С8 и С9 ограничивают полосу пропускания усилителя до 16 Гц, а ферритовые бусины L2 и L3 ослабляют электрические помехи, наводимые на длинные кабели. П-образный фильтр C1, C2, L1 подавляет помехи на входе питания микросхемы IС1. Входные сигналы микросхемы Шаг_А и Шаг_В, управляющие, соответственно, правым и левым каналами двигателя, могут формироваться любым подходящим контроллером. Внутренние цепи защищают усилитель от коротких замыканий и перегрева в случае неисправности шагового двигателя или неправильного подключения его выводов.

Таблица 1
Иллюстрация последовательности импульсов
Таблица 1 иллюстрирует последовательность импульсов Шаг_А и Шаг_В, управляющих вращением типичного шагового двигателя в одном направлении путем непрерывной подачи комбинаций сигналов от 0 до 4. Шаг 4 возвращает вал двигателя в исходное положение, завершая оборот в 360°. Чтобы изменить направление вращения мотора, начинайте формировать временную диаграмму импульсов снизу таблицы и последовательно двигайтесь по ней вверх. Подав напряжение низкого логического уровня на вход SHDN микросхемы (вывод 8), можно отключить оба канала усилителя. Формы сигналов на входах и выходах схемы представлены на Рисунке 2.
![]() В ассортименте полупроводниковых компонентов производства компании Texas Instruments
широко представлены микросхемы драйверов для управления всеми типами электродвигателей
, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных
, бесколлекторных
и шаговых двигателей
с полным комплексом защит по току, напряжению и температуре.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments
широко представлены микросхемы драйверов для управления всеми типами электродвигателей
, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных
, бесколлекторных
и шаговых двигателей
с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов. Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах.
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Типы электродвигателей, способы управления и возникающие сложности
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
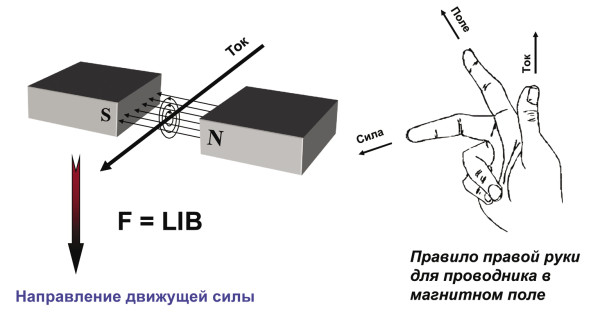
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.

Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.
Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.

Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Бесколлекторные двигатели
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4). Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем.

Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).

Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.

Преимущества двигателей BLDC:
- высокая эффективность;
- отсутствие щеток, обеспечивающее повышенную надежность, снижение затраты на обслуживание;
- линейность тока/крутящего момента;
- упрощенный отвод тепла.
Особенности применения двигателей BLDC:
- более сложная система управления с обратной связью по положению ротора;
- пульсации крутящего момента.
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.

Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).

Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.

Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.

Достоинства шаговых двигателей:
- невысокая стоимость благодаря отсутствию схем контроля скорости вращения и позиционирования;
- высокая точность позиционирования;
- широкий диапазон скоростей вращения;
- простой интерфейс управления с цифровыми контроллерами;
- очень высокая надежность;
- хороший удерживающий момент.
Особенности применения шаговых двигателей:
- ШД присуще явление резонанса;
- из-за отсутствия обратной связи возможна потеря контроля положения;
- потребление энергии не уменьшается даже при работе без нагрузки;
- затруднена работа на очень высоких скоростях;
- невысокая удельная мощность;
- достаточно сложная схема управления.
Традиционные решения для управления электродвигателями
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.

Так, у интегрированного драйвера TI максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера этот показатель не превышает 37°С.

Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).

Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста. На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
Решения для управления электродвигателями от TI
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.

TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).

Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы , и . Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Драйверы TI для BDC
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов , ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.

Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера для управления одним коллекторным двигателем.

Драйверы TI для BLDC
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом. Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.

Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.

Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод , с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.
Шаговый двигатель
это, как понятно из его названия, двигатель который вращается дискретными перемещениями
. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый
и микрошаговый режим
, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы
и старые матричные принтеры
. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297
и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297 , а в доке на L297 на L298N .
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INH1 и INH2 , а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INH1/INH2 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref
надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298
, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298
сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Простой контроллер Шагового Двигателя из компьютерного барахла стоимостью ~150 рублей.
Началось мое станкостроение со случайной ссылки на немецкий станок за 2000DM, который на мой взгляд выглядел по детски, однако мог выполнять довольно много занятных функций. В тот момент, меня заинтересовала возможность рисовать платы (это было еще до появления в моей жизни ЛУТ).
В результате протяженных поисков в сети было найдено несколько сайтов посвященных этой проблеме, однако русскоязычных среди них не было ни одного (это было примерно 3 года назад). В общем, в конце концов, я нашел два принтера CM6337 (кстати их выпускал Орловский завод УВМ), откуда и выдрал униполярные шаговые двигатели (Dynasyn 4SHG-023F 39S, аналог ДШИ200-1-1). Параллельно с доставанием принтеров заказал и микросхемы ULN2803A(с буквой А – DIP корпус). Все собрал, запустил. Что получил, а получил дико греющиеся микросхемы ключей, и с трудом вращающийся двигатель. Так как по схеме из Голландии для увеличения тока ключи соединены попарно, то максимальный отдаваемый ток не превышал 1А, в то время как двигателю надо было 2А (кто ж знал что я найду такие прожорливые, как мне тогда показалось, двигатели J). Кроме того, данные ключи построены по биполярной технологии, для тех кто не в курсе, падение напряжения может быть до 2В (если питание от 5, то фактически половина падает на сопротивлении перехода).
В принципе, для опытов с двигателями от 5” дисководов очень неплохой вариант, можно сделать например плоттер, однако что то более тяжелое чем карандаш (например дремель) ими вряд ли можно тягать.
Решил собрать свою собственную схему из дискретных элементов, благо в одном из принтеров оказалась нетронутой электроника, и я взял оттуда транзисторы КТ829 (Ток до 8А, напряжение до 100В)… Была собрана такая схема…
Рис.1 – Схема драйвера для 4х фазного униполярного двигателя.
Сейчас объясню принцип. При подаче логической “1” на один из выводов (на остальных “0”), например на D0, транзистор открывается и ток течет через одну из катушек двигателя, при этом двигатель отрабатывает один шаг. Далее единица подается на следующий вывод D1, а на D0 единица сбрасывается в ноль. Двигатель отрабатывает сладующий шаг. Если подавать ток сразу в две соседние катушки то реализуется режим полушагов (для моих двигателей с углом поворота 1,8’ получается 400 шагов на оборот).
К общему выводу подсоединяются отводы от середины катушек двигателя (их два если проводов шесть). Очень хорошо теория шаговых двигателей описана тут — Шаговые двигатели. Управление шаговым двигателем., тут же приведена схема контроллера ШД на микроконтроллере AVR фирмы Atmel. Честно говоря, мне показалось похоже на забивание гвоздей часами, однако в ней реализована очень хорошая функция как ШИМ регулирование тока обмоток.
Поняв принцип, несложно написать программу управляющую двигателем через LPT порт. Зачем в этой схеме диоды, а за тем, что нагрузка у нас индуктивная, при возникновении ЭДС самоиндукции она разряжается через диод, при этом исключается пробой транзистора, а следовательно и вывод его из строя. Еще одна деталь схемы – регистр RG (я использовал 555ИР33), используется как шинный формирователь, поскольку ток отдаваемый, например LPT портом мал – можно его элементарно спалить, а следовательно, есть возможность спалить весь компьютер.
Схема примитивна, и собрать такое можно минут за 15-20, если есть все детали. Однако у такого принципа управления есть недостаток – так как формирование задержек при задании скорости вращения задается программой относительно внутренних часов компьютера то работать в многозадачной системе (Win) это все не будет! Будут просто теряться шаги (может быть в Windows и есть таймер, но я не в курсе). Второй недостаток – это нестабилизированный ток обмоток, максимальную мощность из двигателя не выжать. Однако по простоте и надежности этот способ меня устраивает, тем более что для того, что бы не рисковать своим Атлоном 2ГГц, я собрал из барахла 486 тарантас, и кроме ДОСа там, в принципе мало, что можно поставить нормальное.
Описанная выше схема работала и в принципе неплоха, но я решил, что можно несколько переделать схему. Применить MOSFETJ). транзисторы (полевые), выигрыш в том, что можно коммутировать огромные токи (до 75 – 100А), при солидных для шаговых двигателей напряжениях (до 30В), и при этом детали схемы практически не греются, ну если не считать предельных значений (хотел бы я видеть тот который съест ток 100А
Как всегда в России возник вопрос, где взять детали. У меня возникла идея – извлечь транзисторы из горелых материнских плат, благо, например Атлоны кушают порядочно и транзисторы там стоят огого. Дал объявление в ФИДО, и получил предложение забрать 3 мат. платы за 100 рублей. Прикинув что в магазине за эти деньги можно от силы купить 3 транзистора, забрал, расковырял и о чудо, хотя они все и были дохлыми, ни один транзистор в цепи питания процессора не пострадал. Так я получил пару десятков полевых транзисторов за сто рублей. Схема, которая получилась в результате, представлена ниже.

Рис. 2 – Тоже на полевых транзисторах
Отличий в этой схеме немного, в частности была применена микросхема нормального буфера 75LS245 (выпаяна над газовой плитой из 286 материнской платы J). Диоды можно поставить любые, главное, что бы их максимальное напряжение не было меньше максимального напряжения питания, а предельный ток не меньше тока питания одной фазы. Я поставил диоды КД213A, это 10А и 200В. Возможно это излишне для моих 2х амперных двигателей, однако покупать детали не было смысла, да и запас по току думается лишним не будет. Резисторы служат для ограничения тока перезарядки емкости затворов.
Ниже приводится печатная плата контроллера построенного по такой схеме.

Рис. 3 – Печатная плата.
Печатная плата разведена для поверхностного монтажа на одностороннем текстолите (лень мне что то дырочки сверлить сталоJ). Микросхемы в DIP корпусах паяются с подогнутыми ножками, резисторы SMD с тех же материнок. Файл с разводкой в Sprint-Layout 4.0 прилагается. Можно было бы запаять на плату и разъемы, но лень как говорится — двигатель прогресса, да и при отладке железа удобнее было запаять провода подлиннее.
Еще необходимо отметить, что схема снабжена тремя концевиками, на плате справа снизу шесть контактов вертикально, радом с ними посадочные места под три резистора, каждый соединяет один вывод выключателей с +5В. Схема концевиков:

Рис. 4 – Схема концевиков.
Вот так это выглядело у меня в процессе наладки системы:
В результате на представленный контроллер я потратил не более 150 рублей: 100 рублей за материнские платы (при желании можно вообще бесплатно достать) + кусок текстолита, припой и банка хлорного железа в сумме тянут на ~50 рублей, причем хлорного железа останется потом еще много. Думаю считать провода и разъемы смысла не имеет. (Кстати разъем питания отпилен от старого винчестера.)
Так как практически все детали сделаны в домашних условиях, с помощью дрели, напильника, ножовки, рук и такой то матери, то зазоры конечно гигантские, однако модифицировать отдельные узлы в процессе эксплуатации и опытов проще, чем изначально делать все точно.
Если бы на Орловских заводах проточить отдельные детали не стоило бы так дорого, то мне бы конечно проще было бы вычертить все детали в CAD’е, со всеми квалитетами и шероховатостями и отдать на съедение рабочим. Однако знакомых токарей нет… Да и руками как то знаете ли интереснее…
P.S. Хочу высказать свое мнение по поводу негативного отношения автора сайта к советским и Российским двигателям. Советские двигатели ДШИ, вполне себе даже ничего, даже маломощный ДШИ200-1-1. Так что если вам удалось откопать за “пиво” такое добро не спешите выкидывать их, они еще поработают… проверено… Но если же покупать, и разность в стоимости не велика, лучше все таки брать иностранные, поскольку точность у них конечно будет выше.
P.P.S. Е: Если что то я написал не правильно пишите, исправим, но … РАБОТАЕТ…
Большинство на начальном этапе останавливается на выборе покупного (чаще всего — китайского) контроллера для шаговых двигателей, потому как это экономит время. Но уже после того, как станок готов и запущен, начинает закрадываться ощущение, что что-то не то… Чего-то не хватает или что-то сделано не правильно, или не доделано… Появляется некоторое недовольство, вопросы, связанные с точностью станка с ЧПУ. Люди начинают долго и мучительно читать форумы в поисках волшебного рецепта исцеления своего родного станочка от постоянного непопадания «в десятку» (имеются в виду десятые доли миллиметра, которые должен стабильно отрабатывать даже самый пластилиновый станок с ЧПУ, сделанный своими руками).
Моя бабушка всегда говорит: «Где узко, там и рвется». И так действительно происходит! Это же справедливо и для основы основ станка с ЧПУ — механизма линейного перемещения и электроники управления, а именно — контроллера шагового двигателя. О какой точности можно говорить, если человек поставил дешевый китайский контроллер, включил на нем микрошаг 1/8 или даже 1/16 и пытается выдавить из станка микронные перемещения?
Я ничего не имею против китайских контроллеров. У меня самого стоит сейчас самый дешевый китайский контроллер. Но его я брал осознанно, чтобы понять, чего мне не хватает в промышленном контроллере и что я хочу получить в итоге, создавая контроллер шагового двигателя своими руками.
Первое, что я хочу получить от своего контроллера шагового двигателя — это калиброванный микрошаг, который бы настраивался под конкретный экземпляр шагового двигателя. О нелинейности характеристик шаговых двигателей я уже писал в своей статье про и . Если вам лень перейти по ссылке, то вкратце скажу, что в режиме микрошага вы посылаете двигателю команду повернуться на 1/8 шага (к примеру), а он поворачивается вообще не известно на сколько или вообще не поворачивается! Все это как раз из-за нелинейности характеристики шагового двигателя. Вот почему нельзя использовать микрошаговый режим в обычных китайских контроллерах для повышения точности (разрешающей способности) перемещений своего станка с ЧПУ!
Кто-то, возможно, задастся вопросом — откуда берется эта нелинейность? А все дело в том, что на самом деле шаговый двигатель вообще не предназначен для работы в режиме микрошага ! Шаговый двигатель предназначен только для того, чтобы шагать — ать, два! Это мы — ЧПУшники от своей голытьбы решили привнести в мир цифрового двигателя (двигателя с конечными состояниями) немного аналоговости и придумали «микрошаг», в котором шаговый двигатель «зависает» в некотором промежуточном состоянии между двумя шагами. А производители контроллеров радостно подхватили эту фишку и преподносят микрошаг, как некий стандарт де-факто! И впаривают свои контроллеры невдумчивым потребителям.
Если вы — «счастливый» обладатель контроллера с микрошагом, то сказанное мной выше вы сможете сами очень легко проверить по методу лазерной калибровки, описанному мной выше в статье про калибровку шагового двигателя. Достаточно снять со станка шаговик, приделать к нему лазерную указку, включить в контроллере режим микрошага (хотя он, конечно же, у вас включен!) и подавать ему на вход импульсы STEP. Можно прямо из Mach3 или LinuxCNC, выбрав самую минимальную подачу в ручном режиме или задавая микро-перемещения через G-коды. После каждого микрошага делайте отметки на листе бумаги, закрепленному на стене скотчем, в том месте, куда светит луч лазера. Уже после нескольких микрошагов, вы заметите, что между насечками получилось ну просто неприлично разное расстояние!
 Закончим на этом ругать производителей. Они на самом деле ничего плохого не делают. Люди хотели микрошаг — люди его получили! Сосредоточимся лучше на том, чего на самом деле хотели получить конечные пользователи от своего контроллера шагового двигателя? А хотели они получить не деление управляющего шаговыми двигателями сигнала на 8, на 16 и т.д., а деление угла поворота шагового двигателя
на указанные делители! Но какое же для этого нужно подавать управляющее напряжение? Отвечу однозначно — хрен его знает! Поясню… Дело в том, что разные производители делают разные двигатели, применяют разные технологии с разным качеством и разной погрешностью. И получается так, что все шаговые двигатели разные! Даже в пределах одного типа и одной партии. Легла где-то в обмотке шагового двигателя проволочка слегка не на ту сторону — характеристика поменялась! У одного двигателя X витков, у другого двигателя X+Y витков в обмотке — опять характеристики разные. Ну и так далее — до фанатизма
Закончим на этом ругать производителей. Они на самом деле ничего плохого не делают. Люди хотели микрошаг — люди его получили! Сосредоточимся лучше на том, чего на самом деле хотели получить конечные пользователи от своего контроллера шагового двигателя? А хотели они получить не деление управляющего шаговыми двигателями сигнала на 8, на 16 и т.д., а деление угла поворота шагового двигателя
на указанные делители! Но какое же для этого нужно подавать управляющее напряжение? Отвечу однозначно — хрен его знает! Поясню… Дело в том, что разные производители делают разные двигатели, применяют разные технологии с разным качеством и разной погрешностью. И получается так, что все шаговые двигатели разные! Даже в пределах одного типа и одной партии. Легла где-то в обмотке шагового двигателя проволочка слегка не на ту сторону — характеристика поменялась! У одного двигателя X витков, у другого двигателя X+Y витков в обмотке — опять характеристики разные. Ну и так далее — до фанатизма
Именно поэтому микрошаг нужно настраивать под каждый конкретный двигатель, и это должно настраиваться в контроллере шагового двигателя! И именно такой контроллер я сейчас и разрабатываю.
Схема контроллера шаговых двигателей
Схема моего контроллера будет очень проста. Силовыми элементами, непосредственно управляющими обмотками двигателя, будут являться ключевые MOSFET-транзисторы, подключенные в виде Н-моста. Ключами будет управлять микроконтроллер. Никаких дорогостоящих микросхем-драйверов в моей схеме не будет. Вместо них будет парочка ферритовых колечек из сгоревших энергосберегающих ламп, которые отлично подходят для управления затворами MOSFET-транзисторов. В общем, я стараюсь сделать контроллер шагового двигателя доступным для повторения в домашних условиях. Также одним из его достоинств будет являться высокая ремонтопригодность (например, если сгорит какой-либо MOSFET-транзистор в силовой части, то стоимость замены составит ~20-30 рублей).
 Слева представлена схема управления затвором силового MOSFET-ключа моего контроллера шаговых двигателей. Как видно, управление затвором осуществляется через повышающий импульсный трансформатор на ферритовом кольце. Повышающий трансформатор нужен, чтобы силовой ключ полностью открывался от 5-тивольтового сигнала управления, поступающего с выхода микроконтроллера. Для полного гарантированного открытия силовым MOSFET-ам обычно требуется от 10 вольт (более детально характеристику MOSFET-а можно посмотреть на графиках в его datasheet). Особенность такого включения заключается в том, что емкость затвора MOSFET используется в режиме памяти, т.е. при прохождении открывающего импульса через диод D1, транзистор будет открыт сколь угодно долго до тех пор, пока его не закроет открывшийся транзистор Q2, разрядив емкость затвора на «землю». Благодаря такой схеме при управлении ШИМ-сигналом (PWM) удается получить до 100% глубины модуляции (в англоязычных источниках — duty circle или «цикл загрузки»). В стандартной же схеме включения трансформатора затвора (GDT — gate drive transformer), когда положительный импульс открывает MOSFET, а следующий за ним отрицательный импульс восстановления разряжает емкость затвора, удается получить лишь менее 50% периода ШИМ-сигнала.
Слева представлена схема управления затвором силового MOSFET-ключа моего контроллера шаговых двигателей. Как видно, управление затвором осуществляется через повышающий импульсный трансформатор на ферритовом кольце. Повышающий трансформатор нужен, чтобы силовой ключ полностью открывался от 5-тивольтового сигнала управления, поступающего с выхода микроконтроллера. Для полного гарантированного открытия силовым MOSFET-ам обычно требуется от 10 вольт (более детально характеристику MOSFET-а можно посмотреть на графиках в его datasheet). Особенность такого включения заключается в том, что емкость затвора MOSFET используется в режиме памяти, т.е. при прохождении открывающего импульса через диод D1, транзистор будет открыт сколь угодно долго до тех пор, пока его не закроет открывшийся транзистор Q2, разрядив емкость затвора на «землю». Благодаря такой схеме при управлении ШИМ-сигналом (PWM) удается получить до 100% глубины модуляции (в англоязычных источниках — duty circle или «цикл загрузки»). В стандартной же схеме включения трансформатора затвора (GDT — gate drive transformer), когда положительный импульс открывает MOSFET, а следующий за ним отрицательный импульс восстановления разряжает емкость затвора, удается получить лишь менее 50% периода ШИМ-сигнала.
Программа управления шаговым двигателем
Программа управления шаговым двигателем может быть условно разделена на несколько взаимосвязанных функциональных блоков. Подробнее об этих блоках и о их работе я постараюсь написать в ближайшее время. Следите за обновлениями — проект находится в активной разработке
Written By: . Tagged: , .



